1. Технически характеристики наeVTOL мотор
In разпределено електричествоЗадвижващите двигатели задвижват множество витла или вентилатори на крилата или фюзелажа, за да образуват задвижваща система, която осигурява тяга на самолета. Плътността на мощността на двигателя влияе пряко върху товароносимостта на самолета. Изходната мощност, надеждността и адаптивността на двигателя към околната среда са важни фактори за определяне на динамичните характеристики и безопасността на електрическите самолети. Изборът на електрически превозни средства, дронове и eVTOL двигатели е различен поради различни разходи, сценарии на приложение и други причини [1].

(Източник на снимката: Официален уебсайт на Network/Safran)
1) Електрически превозни средствапо-постоянен магнитсинхронни двигатели,Постоянномагнитните двигатели с по-висока ефективност и по-висок въртящ момент могат да осигурят по-добро изживяване при шофиране. В същото време, високата плътност на мощността на постоянномагнитните двигатели може да помогне на електрическите превозни средства да постигнат по-висока мощност при същия обем.
(2) БЛА: често използван безчетковDC мотор.Безчетковият DC мотор е с ниско тегло и шум, а разходите за поддръжка са ниски, което е подходящо за изискванията за полет на безпилотни летателни апарати. Второ, скоростта на безчетковия DC мотор е по-висока, което е подходящо за нуждите на високоскоростните полети на дронове. Например, DJI използва безчеткови мотори.
(3) eVTOL: По-високи изисквания за ефективност на двигателя и плътност на въртящия момент, синхронният двигател с постоянни магнити е многообещаващо решение за електрическа задвижваща система, тъй като двигателят с аксиален поток и постоянни магнити има висок коефициент на използване на радиалното пространство, а плътността на мощността и плътността на въртящия момент имат предимства в случай на малко съотношение дължина-диаметър. Съвременните електрически VTOL самолети, като Joby S4 и Archer Midnight, използват синхронни двигатели с постоянни магнити [1].
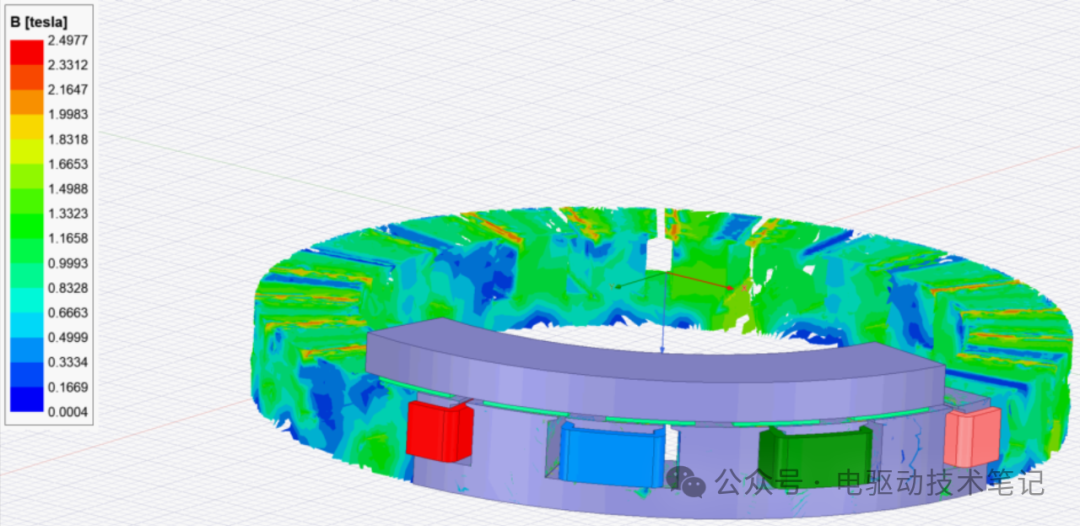
Следната фигура показва облачното изображение на интензитета на магнитната индукция на фиксиран ротор на едностаторен еднороторен аксиален двигател с магнитен поток.
Следната фигура е сравнение на параметрите на двигателите на електрически самолети и електрически превозни средства

2. Тенденция в развитието на eVTOL двигателите
В момента основната тенденция в развитието на захранващите системи eVTOL е намаляването на теглото на конструкцията на двигателя и спомагателното тегло на охладителната система чрез подобряване на технологията за електромагнитен дизайн, технологията за управление на топлината и олекотената технология, както и постоянното подобряване на плътността на мощността на двигателя и капацитета на изходната мощност при широк диапазон от променливи условия. Според „Изследвания и разработки на летящи автомобили и ключови технологии“, авиационният задвижващ двигател е успял да постигне номинална плътност на мощността на тялото на двигателя над 5 kW/kg чрез използване на изолационни материали с по-високи температурни граници, материали с постоянни магнити с по-висока плътност на магнитната енергия и по-леки структурни материали. Чрез подобряване на дизайна на електромагнитната структура на двигателя, като например използването на магнитна решетка на Halbach, структура без желязна сърцевина, намотка с Litz тел и други технологии, както и подобряване на дизайна на разсейване на топлината на двигателя, се очаква номиналната плътност на мощността на тялото на двигателя да достигне 10 kW/kg през 2030 г., а номиналната плътност на мощността да надхвърли 13 kW/kg през 2035 г. [1].

3. Сравнение на изцяло електрически и хибридни маршрути
В сравнение с чисто електрическия маршрут и хибридния маршрут, от настоящия избор на съответните производители, местният проект eVTOL се основава главно на чисто електрическа схема, ограничена от енергийната плътност на литиево-йонните батерии, а eVTOL с нисък капацитет за пътници е най-добрата сцена за кацане на чисто електрическа технология за задвижване. В чужбина някои производители са изготвили предварително хибридния план и са поели водеща роля в множество кръгове на тестване и итерации. Както може да се види от следващата таблица, хибридната схема очевидно е по-силна в ъгъла на издръжливост и може да постигне повече приложения в сценария на трафик на средни и дълги разстояния и ниска надморска височина в бъдеще [1].
Време на публикуване: 27 февруари 2025 г.